
La organización Operation Smile selecciona a alumna de PrepaTec como consejera representante de México a nivel internacional.
La organización Operation Smile selecciona a alumna de PrepaTec como consejera representante de México a nivel internacional.

Los alumnos de cuarto y sexto semestre de PrepaTec organizaron un seminario de liderazgo para los alumnos de segundo semestre.

Empresas juarenses luchan por la preservación del medio ambiente mediante.

Alumnos de PrepaTec Campus Ciudad Juárez asisten y ganan en Nacional de Exteriores 2020 y en el Estatal de tiro con arco en Chihuahua.

Profesor del Tec audiciona para “The Industry Program” en Ciudad de México y queda seleccionado como concursante.

Alumnos de segundo semestre ganan primero y segundo lugar en Circuito de Atletismo Puerto Vallarta 2020.
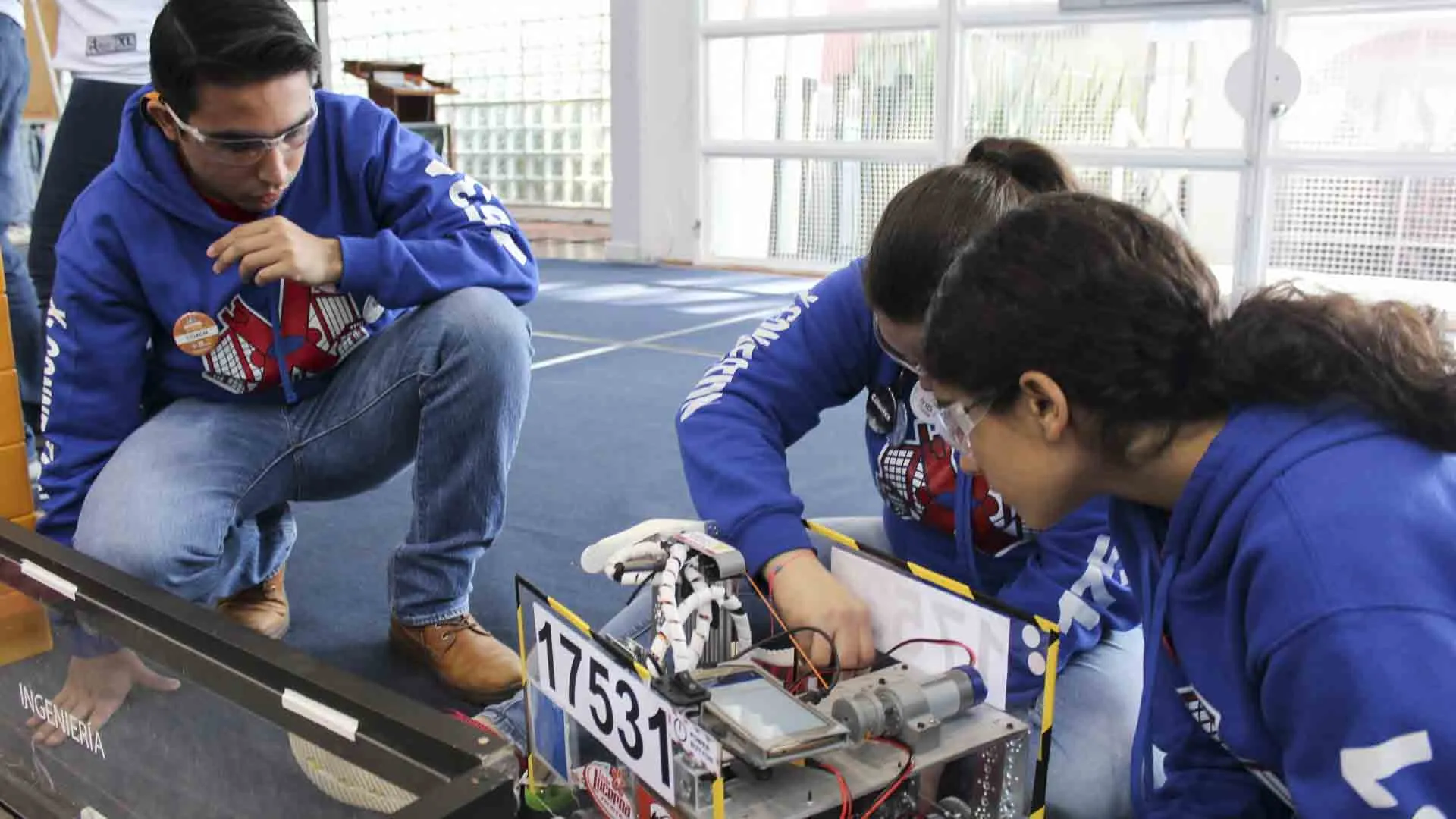
Jóvenes de PrepaTec y Secundaria Tec compiten en nacional de robótica de la categoría FTC de FIRST en México y obtienen cuarto lugar nacional.

Empresarios juarenses y EXATEC crean aplicación de Realidad Aumentada para empresas como Cinemex y Coca Cola.

Por sus logros, la alumna Katia García, de tercer semestre de PrepaTec campus Ciudad Juárez, fue ganadora del Premio Estatal de la Juventud 2019 del estado de Chihuahua.

Estudiantes juarenses tienen la oportunidad de vincularse a la industria laboral de la región gracias a CONREDES.